Description:
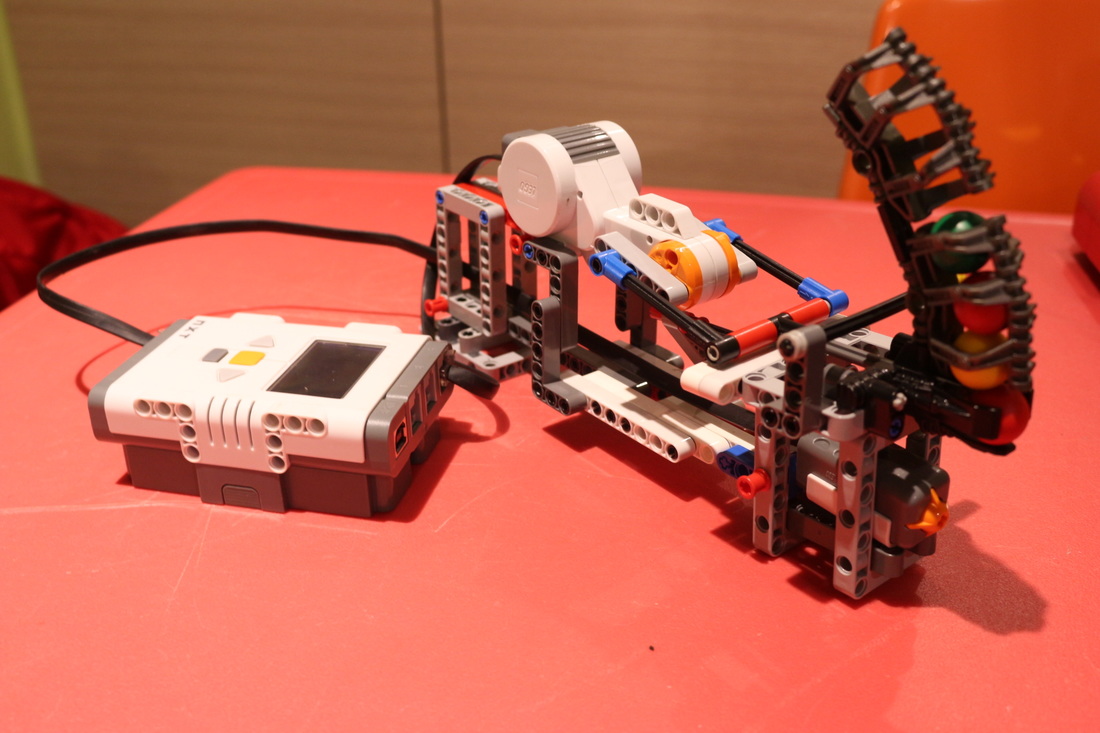
So this is my robot, also known as the "Cannon Of Death". When you press the NXT touch sensor, it sends a signal to the NXT brick which signals the motor to turn. The motor pushes the axle forward, and that forces the ball out of the ball shooter. When the axle draws back following the motor rotation, the second ball is loaded into the holster, which is fired out on the next rotation, and so on.
Problems And How I Solved Them:
This final form is technically the 2nd Design, Mark 23, so i spent alot of time on it and so i had a lot of problems. The first design was very different, using a fast moving- rotating axle to "hit" out the ball of the holster, but that failed, for instance even at the end when many problems were solved already, the axle did not rotate fast enough to hit the ball out at a fast enough speed to make distance.
Other problems in Design 2 include:
Frame not being strong enough
Programming faults
Reach of the axle pushing system not being far enough
The motor not being powerfull enough to force the ball out
(This problem was never fully solved as seen in the video; I had trouble forcing the ball out)
So this is my robot, also known as the "Cannon Of Death". When you press the NXT touch sensor, it sends a signal to the NXT brick which signals the motor to turn. The motor pushes the axle forward, and that forces the ball out of the ball shooter. When the axle draws back following the motor rotation, the second ball is loaded into the holster, which is fired out on the next rotation, and so on.
Problems And How I Solved Them:
This final form is technically the 2nd Design, Mark 23, so i spent alot of time on it and so i had a lot of problems. The first design was very different, using a fast moving- rotating axle to "hit" out the ball of the holster, but that failed, for instance even at the end when many problems were solved already, the axle did not rotate fast enough to hit the ball out at a fast enough speed to make distance.
Other problems in Design 2 include:
Frame not being strong enough
Programming faults
Reach of the axle pushing system not being far enough
The motor not being powerfull enough to force the ball out
(This problem was never fully solved as seen in the video; I had trouble forcing the ball out)
 RSS Feed
RSS Feed
